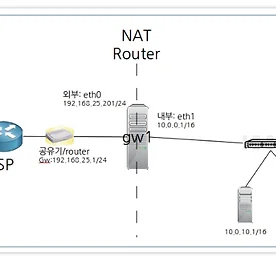
Linux 썸네일형 리스트형 Linux NAT router 설정하기 - Ubuntu 14.4 dom0, xen pv guest 환경 외부 네트워크(192.168.25.*)와 내부 네트워크(10.10.*.*)가 분리된 상황에서 내부 네트워크의 머신들이 wget이나 패키지 설치 등의 외부(인터넷) 접속을 통한 작업을 진행할 경우의 routing, ip forwarding 을 설정하는 과정에 대해 정리한다. 이러한 기능의 핵심이 되는 서버는 그림에서 보듯이 NAT router이다(참고: 본 테스트의 수행은 Ubuntu 14.4 LTS, Xen host 상에서, 여러 개의 ubuntu guest vm들을 생성하여 진행하였다). 1. Gateway 서버와 내부 서버의 NIC 설정 * gw1(NAT router, 여기서의 서버 이름은 ubuntu14-pvha1) 서버는 2 개의 네트워크 인터페이스(NIC)을 가진다 - eth0, ip:192.1.. 더보기 Python GUI 프로그래밍을 위한 PySide 1.2.2, Linux/Windows 에 설치하기 Python을 활용한 GUI 프로그래밍에 꼭 한 번씩 거론되는 것이 있다. 오픈소스 프로젝트로서, Python을 위한 C++바인딩인 PySide 프로젝트가 그것이다. 참고로, 기존의 PyQt4에는 API Level 1과 API level 2 가 각각 존재하고 있으며, 그에 비해 PySide는 PyQt API level 2 만을 고려하여 구현되어 있다(PySide 쪽이 LGPL이 적용되어 PyQt 보다 저작권 면에서 더 자유롭다...정도만 얘기하고, Qt의 역사나 핀란드의 노키아, 디지아 등 잡다한 궁금한 점들은 구글링으로 해결하자). 서두가 너무 길었다. 간단히 글 게재의 목적만 말하자면, PySide 1.2.1 버전은 대다수 리눅스 배포판 등의 소프트웨어 다운&설치 명령들(yum, zypper, apt.. 더보기 OpenSuse 12.x host에서 virtualbox 설치 사용시 주의 Linux host에서 가상화 지원 솔루션 중 VirtualBox를 설치하고 사용하는 경우에, 특히 OpenSuse 12.x 환경에서 virtualbox 를 설치하고, VM을 사용하고자 할 경우(ubuntu 등 기타 linux에서도 비슷하게 적용될 듯)에 주의 사항이 있다. virtualbox를 https://www.virtualbox.org/wiki/Downloads 에서 다운로드 받고 설치, VirtualBox 기동 후 extpack 까지 설치하고 난 후, virtualbox 메뉴에서 vm을 생성하고 머신을 시작하려고 하면 "virtualbox kernel driver not installed (rc=-1908)" 라는 메시지 창이 뜨고 '/etc/init.d/vboxdrv setup' 을 실행하라고.. 더보기 Linux에서 부트시 스크립트 자동실행 설정하기 이 부분을 이해 하려면 Unix의 RunLevel에 대해 알아야 한다. 기본적으로 Unix 계열의 OS는 아래의 7개 모드로 구분된 Run level을 가진다 0 - Halt status 1 - Single User 2 - Multi User, No Networking 3 - Multi User, Full Networking 4 - Reserved 5 - 3 & X windows 6 - Restarting status 위 각각의 상태로 시스템이 전환될 때 자동적으로 /etc/rc.d/rc?.d/ 의 스타일로 7개의 서브 dir 이 준비되어 있고 각각의 디렉토리내에는 S??scriptname, K??scriptname 형태의 파일들이 존재하는데 S는 start, K는 kil, ??의 숫자는 해당 모드로 진.. 더보기 이전 1 다음